")

الکتروموتور چیست
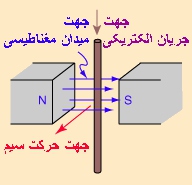
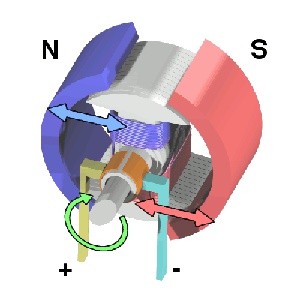
الکتروموتور یا موتور الکتریکی (Electric Motor) نوعی ماشین است که انرژی الکتریکی را به حرکت مکانیکی تبدیل میکند. الکتروموتورها توسط اثر الکترومغناطیس کار میکنند. ایده کلی بر این اساس است که وقتی که یک هادی حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی قرار میگیرد، نیرویی بر روی آن هادی حامل جریان از سوی میدان مغناطیسی اعمال میشود. اغلب موتورهای الکتریکی دوار هستنند، اما موتور خطی هم وجود دارند. در یک موتور دوار بخش متحرک چرخانه یا روتور و بخش ثابت (که معمولاً درون موتور است) ایستانه یا استاتور خوانده میشود.در یک الکتروموتور، روتور به علت گشتاوری که ناشی از نیرویی است که توسط میدان مغناطیسی ایجاد شده در استاتور است به حول محور خود میچرخد. هر الکتروموتور بر اساس ساختارش توسط برق جریان مستقیم DC و یا برق جریان متناوب AC تغذیه میگردد.
الکتروموتور جریان مستقیم یا الکتروموتور DC
الکتروموتور
کلاسیک جریان مستقیم DC
دارای آرميچری
از آهنربای الکتریکی است. یک سوییچ گردشی بنام کموتاتور جهت جریان
الکتریکی را در هر سیکل دو بار برعکس میکند تا آهنرباهای
الکتریکی بوجود آمده در آرمیچر، آهنربای دائمی را در بیرون آرمیچر جذب و
دفع کنند. سرعت دوران الکتروموتور
DC به مجموعهای از ولتاژ و
جریان عبوری از سیم پیچهای الکتروموتور
و بار قرار گرفته بر روی
الکتروموتور
یا همان گشتاور ترمزی بستگی دارد.
 سرعت دوران الکتروموتور
جریان مستقیم DC وابسته به ولتاژ ورودی و گشتاور
آن وابسته به جریان عبوری است. معمولاً سرعت توسط ولتاژ متغیر یا عبور
جریان و با استفاده از نوعی کلید تغییر دهنده وضعیت سیمپیچها در
سیمپیچی موتور یا با داشتن یک منبع ولتاژ متغیر، کنترل
میشود. بدلیل اینکه این نوع از موتور میتواند در
سرعتهای پایین گشتاوری زیاد ایجاد کند، معمولاً از آن در
کاربردهای کششی نظیر لوکوموتیوها استفاده میکنند.
سرعت دوران الکتروموتور
جریان مستقیم DC وابسته به ولتاژ ورودی و گشتاور
آن وابسته به جریان عبوری است. معمولاً سرعت توسط ولتاژ متغیر یا عبور
جریان و با استفاده از نوعی کلید تغییر دهنده وضعیت سیمپیچها در
سیمپیچی موتور یا با داشتن یک منبع ولتاژ متغیر، کنترل
میشود. بدلیل اینکه این نوع از موتور میتواند در
سرعتهای پایین گشتاوری زیاد ایجاد کند، معمولاً از آن در
کاربردهای کششی نظیر لوکوموتیوها استفاده میکنند.
به هرحال در طراحی کلاسیک محدودیتهای متعددی وجود دارد که
بسیاری از این محدودیتها ناشی از نیاز به جاروبکهایی برای اتصال
به کموتاتور است. جنس جاروبکها معمولا از گرافیت میباشد. سایش
جاروبکها و کموتاتور، ایجاد اصطکاک میکند و هر چه که
سرعت دوران الکتروموتور
بالاتر باشد، جاروبکها
میبایست محکمتر فشار داده شوند تا اتصال خوبی را برقرار کنند.
نه تنها این اصطکاک منجر به سر و صدای الکتروموتور
میشود بلکه
این امر یک محدودیت بالاتری را روی سرعت دوران ایجاد میکند و به
این معنی است که جاروبکها نهایتاً از بین رفته نیاز به تعویض
پیدا میکنند. اتصال ناقصالکتریکی نیز تولید نویز
الکتریکی در مدار متصل میکند. برای حل این مشکلات، با جابجا
کردن آهنرباهای دائم با آهنرباهای الکتریکی و با قرار دادن آهنرباهای دائم
در روی روتور و سیم پیچها در روی استاتور به یک طراحی بدون
جاروبک میرسیم.
همچنین آهنرباهای دائم در روی استاتور یک الکتروموتور DC را
میتوان با آهنرباهای الکتریکی تعویض کرد. به این نوع
الکتروموتورهای
میدان سیم پیچی شده میگویند. با تغییر مفدار جریان عبوری
از سیم پیچهای استاتور (آهنربای الکتریکی) میتوانیم نسبت
سرعت/گشتاور الکتروموتور
را تغییر دهیم. اگر سیم پیچی میدان استاتور به
صورت سری با سیم پیچی آرمیچر قرار داده شود، یک الکتروموتور گشتاور
بالای
کم سرعت و اگر به صورت موازی قرار داده شود، یک الکتروموتور سرعت
بالا با
گشتاور کم خواهیم داشت. میتوانیم برای بدست آوردن حتی سرعت
بیشتر اما با گشتاور به همان میزان کمتر، جریان میدان استاتور را کمتر هم
کنیم. این تکنیک برای کشش الکتریکی و بسیاری از کاربردهای مشابه آن
ایدهآل است و کاربرد این تکنیک میتواند منجر به حذف
تجهیزات یک جعبه دنده متغیر مکانیکی شود.
الکتروموتور هاي DC
با تحريک مستقل نیز از انواع دیگر الکتروموتورهای
جريان
مستقيم میباشد. اين نوع الکتروموتور
ها نيز مانند ساير الکتروموتورهاي
DC
از مزیت گشتاور بالا در لحظه راه اندازي برخوردار هستند. از دیگر انواع
الکتروموتورهای جريان مستقيم میتوان به الکتروموتورهای جریان مستقیم سری،
الکتروموتورهای جریان مستقیم شنت و الکتروموتورهای جریان مستقیم کمپوند
اشاره کرد.
یکی از انواع الکتروموتورهای
DC میدان سیم پیچی شده، موتور FVTE یا
الکتروموتور
یونیورسال است. اسم این موتورها از این واقعیت گرفته
شدهاست که این الکتروموتور
ها را میتوان هم با جریان
DC و
هم AC بکار برد، اگر چه که اغلب عملاً این موتورها با تغذیه جریان
متناوب کار میکنند. اصول کار این الکتروموتور ها بر
این اساس است
که وقتی یک الکتروموتور DC
میدان سیم پیچی شده به جریان متناوب وصل
میشود، جریان هم در سیم پیچی میدان و هم در سیم پیچی آرمیچر (و
در میدانهای مغناطیسی منتجه) همزمان تغییر میکند و
بنابراین نیروی مکانیکی ایجاد شده همواره بدون تغییر خواهد بود. در عمل
این نوع الکتروموتور
بایستی به صورت خاصی طراحی شود تا با جریان متناوب
سازگاری داشته باشد (امپدانس و راکتانس بایستی مدنظر قرار گیرند) و
الکتروموتور
نهایی عموماً دارای کارایی کمتری نسبت به یک الکتروموتور
معادل DC
خالص خواهد بود. مزیت این الکتروموتور
ها این است که
میتوان POGH تغذیه AC را روی الکتروموتورهایی که دارای
مشخصههای نوعی الکتروموتورهای
DC هستند بکار برد، خصوصاً اینکه
این الکتروموتور
ها دارای گشتاور راه اندازی بسیار بالا و طراحی بسیار جمع
و جور در سرعتهای دوران بالا هستند. جنبه منفی این نوع الکتروموتور ها
تعمیر و نگهداری مشکل و قابلیت اطمینان پایین آنهاست که به علت وجود
کموتاتور ایجاد میشود و در نتیجه این الکتروموتور ها به
ندرت در
صنایع مشاهده میشوند، اما عمومیترین موتورهایFG AC در
دستگاههایی نظیر مخلوط کن و ابزارهای برقی خانگی مورد استفاده
قرار میگیرند.
الکتروموتور جریان متناوب یا الکتروموتور AC
الکتروموتورهای
القایی AC عمومیترین
الکتروموتور
هایی هستند که بعنوان محرکهای مکانیکی صنعتی و همچنین خانگی
استفاده میشوند. طراحی ساده و مستحکم، قیمت ارزان، هزینه
نگهداری پایین و اتصال آسان و کامل به یک منبع تغذیه جریان متناوب AC از
امتیازات اصلی یک الکتروموتور
القایی AC است. انواع متنوعی از
الکتروموتور های
القایی AC در بازار موجود است. الکتروموتور های
مختلف برای
کارهای مختلفی مناسب اند. با اینکه طراحی الکتروموتورهای القایی
AC آسانتر
از الکتروموتور های DC
است، ولی کنترل سرعت و گشتاور در انواع مختلف
الکتروموتورهای
القایی AC نیازمند درکی عمیقتر در طراحی و مشخصات در این
نوع الکتروموتور
هاست. این نکته در اساس انواع مختلف، مشخصات آنها، انتخاب
شرایط برای کاربریهای مختلف و روشهای کنترل مرکزی یک الکتروموتور القایی
AC را مورد بررسی فرار میدهد.
اساس کار الکتروموتور های القایی
مانند بیشتر الکتروموتور
ها، یک الکتروموتور القایی
AC، یک قسمت ثابت بیرونی به نام استاتور و یک قسمت متحرک که در میان آن
میگردد به نام روتور دارد، که میان ایندو یک فاصله هوایی دقیق و کارشناسی
شده وجود دارد. به طور مجازی همه موتورهای الکتریکی از میدان مغناطیسی
دوار برای گرداندن روتورشان استفاده میکنند. یک الکتروموتور سه
فاز القایی AC تنها نوعی است که در آن میدان مغناطیسی دوار
به طور طبیعی
بوسیله استاتور به علت خاصیت سه
فاز بودن منبع تغذیه آن تولید
میشود. در حالی که الکتروموتور
های DC به وسیلهای
الکتریکی یا مکانیکی برای تولید این میدان دوار نیاز دارند. یک
الکتروموتور القایی
AC تک فاز نیازمند یک وسیله الکتریکی خارجی برای تولید
این میدان مغناطیسی دوار است. در درون هر موتور دو سری آهنربای مغناطیسی
تعبیه شدهاست. در یک الکتروموتور
القایی AC یک سری از مغناطیس
شوندهها به خاطراینکه تغذیه AC به سیم پیچهای استاتور متصل است
در استاتور تعبیه شدهاند. بخاطر طبیعت متناوب تغذیه ولتاژ AC بر
اساس قانون لنز نیرویی الکترومغناطیسی به روتور وارد میشود
(درست شبیه ولتاژی که در ثانویه ترانسفورماتور القا میشود).
بنابر این سری دیگر از مغناطیس شوندهها خاصیت مغناطیسی پیدا
میکنند. -نام الکتروموتور
القایی از اینجاست-. تعامل میان این
مگنتها انرژی چرخیدن یا تورک (گشتاور) را فراهم
میآورد. در نتیجه محور الکتروموتور
در جهت گشتاو بوجود آمده
چرخش میکند.
استاتور
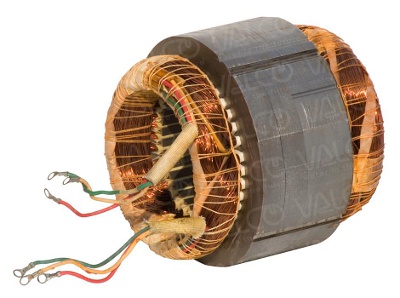
استاتور از چندین لایه ورق نازک ار آلیاژ آهن و سیلیسیم ساخته شدهاست. این قطعات بصورت یک سیلندر تو خالی به هم منگنه و محکم شده اند(هسته استاتور) با شیارهایی که موازی یکدیگر ایجاد شده اند. سیم پیچهایی از سیم روکش دار در این شیارها جاسازی شدهاند. هر گروه از کلافها با هستهای که آن را فرا گرفته یک آهنربای مغناطیسی (با دو پل) را برای کار کردن با تغذیه AC شکل میدهد. تعداد قطبهای یک الکتروموتور القایی AC به اتصال درونی کلافهای استاتوربستگی دارد. کلافهای استاتور مستقیماً به منبع انرژی الکتریکی متصل اند. آنها به صورتی متصل اند که با برقراری تغذیه AC یک میدان مغناطیسی چرخنده تولید میشود.
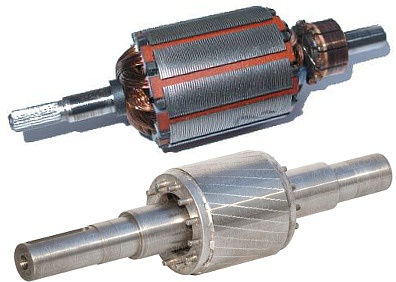
روتور
روتور از چندین ورق مجزای باریک فولادی که میانشان میلههایی از مس یا آلومینیم تعبیه شده ساخته شدهاست. در رایجترین نوع روتور (روتور قفس سنجابی) این میلهها در انتهای خود به صورت الکتریکی و مکانیکی بوسیله حلقههایی به هم متصل شدهاند. تقریباً ۹۰ درصد از الکتروموتور های القایی دارای روتور قفس سنجابی میباشند و این به خاطر آن است که این نوع روتور ساختاری مستحکم و ساده دارد. این روتور از هستهای چند تکه استوانهای با محوری که شکافهای موازی برای جای دادن میله های رسانا درون آن دارد تشکیل شدهاست. هر شکاف یک میله مسی یا آلومنیومی یا آلیاژی را شامل میشود. در این میلهها به طور دائمی بوسیله حلقههای انتهایی آنها یک مدار اتصال کوتاه برقرار است. چون این نوع مونتاژ درست شبیه قفس سنجاب است، این نام برای آن انتخاب شدهاست. میله های روتور دقیقاً با محور موازی نیستند. در عوض به دو دلیل مهم قدری اریب نصب میشوند. دلیل اول آنکه الکتروموتور با کاهش صدای مغناطیسی (برای آنکه از هارمونیکها در شکافها کاسته میشود)، بدون صدا کارکرده و دلیل دوم آن است که گرایش روتور به قفل کردن کمتر شود. دندانههای روتور به خاطر جذب مغناطیسی مستقیم تلاش میکنند که در مقابل دندانههای استاتور باقی بمانند. این اتفاق هنگامی میافتد که تعداد دندانههای روتور و استاتور برابر باشند. روتور بوسیله یاتاقان هایی در دو انتهای محور روتور نصب میشود که یک انتهای محور در حالت طبیعی برای انتقال نیرو بلندتر از طرف دیگر گرفته میشود. ممکن است بعضی الکتروموتور ها محوری فرعی در طرف دیگر(غیر از طرف منتقل کننده نیرو) برای اتصال دستگاههای حسگر وضعیت محور و سرعت داشته باشند. بین استاتور و روتور شکافی هوایی موجود است. بعلت القای مغناطیسی انرژی از استاتور به روتور منتقل میشود. گشتاور تولید شده به روتور نیرو داده و سپس برای چرخیدن به آن نیرو وارد میکند. صرف نظر از روتور استفاده شده قواعد کلی برای دوران یکی است.
انواع الکتروموتور های القایی
عموماً دسته بندی الکتروموتورهای
القایی براساس
تعداد پیچه ها یا همان کلاف های استاتور است که عبارتند از:
الکتروموتور
های القایی تک فاز
الکتروموتور
های القایی سه فاز
الکتروموتور القایی تک فاز
در بین انواع الکتروموتور ها، از الکتروموتور های القایی AC تکفاز بیشتر استفاده میشود. منطقی است که باید این نوع از الکتروموتور دارای قیمت پایین تر و هزینه نگهداری کمتر باشد. موتور القایی AC تک فاز بهترین مصداق این توصیف است. آن طور که از نام آن برمی آید، این نوع از الکتروموتور تنها یک پیچه یا یک کلاف (کلاف اصلی) دارد و با یک منبع تغذیه متناوب تک فاز کار میکند. در تمام الکتروموتور های القایی تک فاز، روتور از نوع قفس سنجابی است. الکتروموتور تک فاز القایی خودراه انداز نیست. هنگامی که الکتروموتور به یک منبع تغذیه تک فاز متصل است پیچه یا همان کلاف اصلی دارای جریانی متناوب میشود. این جریان متناوب میدان مغناطیسی ای ضربانی تولید میکند. به سبب القا، روتور تحریک میشود. چون میدان مغناطیسی اصلی ضربانی است گشتاوری که برای چرخش الکتروموتور لازم است بوجود نمیآید و سبب ارتعاش روتور و نه چرخش آن میشود. از این رو الکتروموتور القایی تک فاز به دستگاه آغازگری (استارتر) نیاز دارد که میتواند ضربات آغازی را برای چرخش موتور تولید کند. دستگاه آغازگر الکتروموتور های القایی تک فاز اساساً پیچهای اضافی در استاتور است (پیچه کمکی یا راه انداز). پیچه استارت میتواند دارای خازنهای سری ویا سوئیچ گریز از مرکز باشد. هنگامی که ولتاژ تغذیه برقرار است جریان در پیچه اصلی بسبب مقاومت پیچه اصلی ولتاژ تغذیه را افت میدهد (ولتاژ به جریان تبدیل میشود). در همین حین جریان در پیچه استارت بسته به مقاومت دستگاه استارت به افزایش ولتاژ تغذیه تبدیل میشود. فعل و انفعال میان میدانهای مغناطیسی که پیچه اصلی و دستگاه استارت (شامل پیچه کمکی و خازن) میسازند میدان برایندی میسازند که در جهتی گردش میکند. محور الکتروموتور گردش را در جهت این میدان برایند آغاز میکند. هنگامی که الکتروموتور به ۷۵ درصد دور مجاز خود میرسد یک سوئیچ گریز از مرکز پیچه استارت را از مدار خارج میکند. از این لحظه به بعد الکتروموتور تک فاز میتواند گشتاور کافی را برای ادامه کارکرد خود نگه دارد. بجز انواع خاص، عموما همه الکتروموتور های تک فاز فقط برای کاربریهای کمتر از 3 اسب بخار استفاده میشوند. بسته به انواع تکنیکهای استارت، الکتروموتور های القایی تک فاز AC در انواعی به شرح ذیل قرار دارند.
الکتروموتور تک فاز القایی AC با فاز شکسته
الکتروموتور فاز شکسته همچنین با عنوان استارت القایی / کارکرد القایی هم شناخته میشود که دو پیچه دارد. پیچه استارت از سیم نازکتر و تعداد دور کمتر نسبت به پیچه اصلی برای بوجود آوردن مقاومت بیشتر ساخته شدهاست. همچنین میدان پیچه استارت در زاویهای غیر از آنچه که پیچه اصلی دارد قرار میگیرد که سبب آغاز چرخش محور الکتروموتور میگردد. پیچه اصلی که از سیم ضخیم تری ساخته شدهاست الکتروموتور را همیشه درحالت چرخش باقی نگه میدارد. گشتاور آغازین کم است مثلاً ۱۰۰ تا ۱۷۵ درصد گشتاور نامی است. الکتروموتور برای استارت جریانی زیاد طلب میکند، که تقریباً ۷۰۰ تا ۱۰۰۰ درصد جریان نامی است. گشتاور حداکثر تولید شده نیز در محدوده ۲۵۰ تا ۳۵۰ درصد از گشتاور نامی میباشد.کاربریهای خوب برای الکتروموتور های فاز شکسته شامل سنگ سمباده های کوچک، دمندهها و فنهای کوچک و دیگر دستگاههایی با نیاز به گشتاور آغازین کم و با نیاز به قدرت ۱/۲۰ تا ۱/۳ اسب بخار میباشد.این الکتروموتور ها در کاربریهایی که نیاز به روشن و خاموش کردنهای پیاپی و یا نیاز به گشتاور زیاد دارند مناسب نمیباشند.
الکتروموتور تک فاز القایی AC با استارت خازنی
این نوع همان الکتروموتور با فاز شکسته، اصلاح شده با خازنی سری با آن برای بهبود استارت است. همانند الکتروموتور معمولی با فاز شکسته، این نوع الکتروموتور یک سوئیچ گریز از مرکز داشته که هنگامی که محور الکتروموتور به ۷۵ درصد سرعت نامی میرسد، پیچه استارت را از مدار خارج مینماید. از آنجا که خازن در مدار استارت است، گشتاور استارت بیشتری تولید میکند که معمولاً در حدود ۲۰۰ تا ۴۰۰ درصد گشتاور نامی است و جریان استارت معمولاً بین ۴۵۰ تا ۵۷۵ درصد جریان نامی است که بسیار کمتر از الکتروموتور با فاز شکسته و بعلت سیم ضخیمتر در مدار استارت است. نوع اصلاح شدهای از الکتروموتور با استارت خازنی، الکتروموتور با استارت مقاومتی است. در این نوع الکتروموتور خازن استارت با یک مقاومت جایگزین شدهاست. الکتروموتور با استارت مقاومتی در کاربریهایی مورد استفاده قرار میگیرد که میزان گشتاور استارت، کمتر از مقداری که الکتروموتور با استارت خازنی تولید میکند لازم است. صرف نظر از هزینه، این الکتروموتور امتیازات عمدهای نسبت به الکتروموتور با استارت خازنی ندارد. این الکتروموتور ها در انواع مختلف کاربریهای پولی و تسمهای مانند تسمه نقالههای کوچک و در پمپها، دمندههای بزرگ و کاربریهای چرخ دندهای به خوبی استفاده میشوند.
الکتروموتور تک فاز القایی AC با خازن دائمی اسپلیت
این الکتروموتور تک فاز نوعی خازن دائماً متصل به صورت سری به پیچه استارت دارد. این کار سبب آن میشود که پیچه استارت تازمانی که محور الکتروموتور به سرعت چرخش نامی خود برسد بصورت پیچهای کمکی عمل کند. از آنجا که خازن عملکرد اصلی، باید برای استفاده مداوم طراحی شده باشد، نمیتواند توان استارتی معادل یک الکتروموتور استارت خازنی ایجاد نماید. گشتاور استارت یک الکتروموتور تک فاز با خازن دائمی معمولاً کم و در حدود ۳۰ تا ۱۵۰ درصد گشتاور نامیاست. الکتروموتور های تک فاز با خازن دائمی، جریان راه اندازی پایینی دارند که معمولاً در کمتر از ۲۰۰ درصد جریان نامی است که آنها را برای کاربریهایی دارای پریودهای خاموش-روشن با سرعت بالا بسیار مناسب میسازد. این الکتروموتور های تک فاز امتیازات فراوانی دارند. طراحی الکتروموتور براحتی برای استفاده با کنترل کنندههای سرعت دوران میتواند اصلاح شود. همچنین میتوانند برای بازدهی بهینه و ضریب توان بالا در بار نامی طراحی شوند. آنها به عنوان قابل اطمینانترین الکتروموتور تک فاز مطرح میشوند. مخصوصا به این خاطر که به سوئیچ گریز از مرکز نیازی ندارند. این الکتروموتور ها بسته به طراحیشان کاربری بسیار متنوعی دارند که شامل فنها، دمندهها با نیاز به گشتاور استارت کم و پریودهای کاری غیر دائمی مانند بازکنندههای درب گاراژها میشود.
الکتروموتور تک فاز القایی AC استارت با خازن / کارکرد با خازن
این الکتروموتور تک فاز، همانند الکتروموتور با استارت خازنی، خازنی از نوع استارتی در حالت سری با پیچه کمکی برای گشتاور زیاد استارت دارد. همچنین مانند یک الکتروموتور تک فاز با خازن دائمی، خازنی از نوع کارکرد دائم دارد که درکنار خازن استارت در حالت سری با پیچه کمکی است که بعد از شروع به کار الکتروموتور از مدار خارج میشود. این حالت سبب بوجود آمدن گشتاوری اضافی میشود. این نوع الکتروموتور تک فاز میتواند برای بازده بیشتر طراحی شود. این الکتروموتور بخاطر خازنهای کارکرد دائم و استارت و سوئیچ گریز از مرکز آن نسبتا پرهزینهاست. این الکتروموتور میتواند در بسیاری از کاربریهایی که از هر الکتروموتور تک فاز دیگری انتظار میرود استفاده شود. این کاربریها شامل ماشینهای مرتبط با چوب، کمپرسورهای هوا، پمپهای آب فشار قوی، پمپهای تخلیه و دیگر کاربردهای نیازمند گشتاورهای بالا میشوند.
الکتروموتور تک فاز القایی AC با قطب سایه دار (با حلقه اتصال کوتاه)
الکتروموتور های تک فاز با قطب سایه دار فقط یک پیچه یا کلاف اصلی دارند و پیچه یا کلاف راه انداز ندارند. استارت خوردن بوسیله طرح خاص آن که حلقه پیوسته مسی ای را دور قسمت کوچکی از هر قطب الکتروموتور حلقه میکند انجام میشود. این سایه که قطب را دو تکه میکند سبب میشود که میدان مغناطیسی ای ضعیفتر در ناحیه سایه خورده نسبت به قسمت دیگر و در کنار آن بوجود آید. تعامل میان میدانها محور را به چرخش وامی دارد. چون الکتروموتور تک فاز با قطب سایه خورده پیچه استارت، سوئیچ استارت ویا خازن ندارد از نظر الکتریکی ساده و ارزان است. همچنین سرعت آن را صرفا با تغییر ولتاژ یا بوسیله یک پیچه با چند دور مختلف میتوان کنترل کرد. ساختار الکتروموتور تک فاز با قطب سایه خورده از نظر مکانیکی اجازه تولید انبوه را میدهد. درحقیقت این الکتروموتورها به الکتروموتورهای یکبار مصرف معروفند. بدین معنی که جایگزین کردن آنها ارزانتر از تعمیر آنهاست. الکتروموتور تک فاز های با قطب سایه دار مشخصات مثبت زیادی دارند. اما چندین مورد عیب هم دارند. گشتاور استارت کم آن معمولاً ۲۵ تا ۷۵ درصد گشتاور نامی است. آنها الکتروموتور هایی با اتلاف بالا هستند که سرعتی حدود ۷ تا ۱۰ درصد سرعت سنکرون دارند. عموماً بازده این نوع الکتروموتور بسیار پایین است (کمتر از ۲۰ درصد). هزینه اولیه پایین آن را برای قدرت کمتر یا کاربردهای با کار کمتر مناسب میسازد. شاید وسیعترین استفاده از آنها در فنهای چند سرعته برای استفاده خانگی است. ولی گشتاور کم، الکتروموتور تک فاز دارای قطب سایه دار را برای بیشتر کاربریهای صنعتی یا تجاری که در آنها کار مداوم یا پریودهای گردش بیشتر معمول است غیر قابل استفاده میکند.
الکتروموتور القایی سه فاز
برای کاربردهای نیازمند به توان بالاتر، از
الکتروموتورهای
القایی سه فاز AC (یا چند فاز) استفاده میشود.
این
الکتروموتورها
از اختلاف فاز موجود بین فازهای منبع تغذیه چند فاز
الکتریکی برای ایجاد یک میدان الکترومغناطیسی دوار درونشان، استفاده
میکنند. اغلب، روتور شامل تعدادی هادیهای مسی است که
در فولاد
قرار داده شدهاند. از طریق القای الکترومغناطیسی میدان مغناطیسی
دوار در این هادیها القای جریان میکند، که در نتیجه
منجر به
ایجاد یک میدان مغناطیسی متعادل کننده شده و موجب میشود که محور
الکتروموتور سه فاز
در جهت گردش میدان به حرکت در آید.
این نوع از الکتروموتور
با نام الکتروموتور القایی
معروف است. برای اینکه
محور این الکتروموتور
به حرکت درآید بایستی همواره محور الکتروموتور
با
سرعتی کمتر از فرکانس منبع تغذیه اعمالی به الکتروموتور بچرخد،
چرا
که در غیر این صورت میدان متعادل کنندههای در روتور ایجاد
نخواهد
شد. استفاده از این نوع الکتروموتور
در کاربردهای ترکشن نظیر لوکوموتیوها،
که در آن به موتور ترکشن آسنکرون معروف است، روز به روز در حال افزایش
است. به سیم پیچهای روتور جریان میدان جدایی اعمال میشود تا یک
میدان مغناطیسی پیوسته ایجاد شود، که در الکتروموتور همزمان
وجود دارد،
الکتروموتور سه فاز
به صورت همزمان با میدان مغناطیسی دوار ناشی از برق AC سه
فاز، به گردش در میآید. الکتروموتورهای همزمان
(سنکرون) را
میتوانیم به عنوان مولد جریان هم بکار برد.
سرعت یک الکتروموتور AC
در ابتدا به فرکانس تغذیه بستگی دارد و مقدار
لغزش، یا اختلاف در سرعت چرخش بین روتور و میدان مغناطیسی استاتور، گشتاور
تولیدی موتور را تعیین میکند. تغییر سرعت در این نوع از
الکتروموتورها
را میتوان با داشتن دسته سیم پیچهای مختلف با
تعداد
قطبهای مختلف در بخش استاتور که با استفاده از آنها سرعت میدان دوار
مغناطیسی تغییر میکند، ممکن ساخت. همچنین با تغییر دادن فرکانس
منبع
تغذیه، میتوان کنترل یکنواخت تری بر روی سرعت این نوع ازالکتروموتور را
داشت.
الکتروموتور القایی سه فاز قفس سنجابی
تقریباً ۹۰ درصد از الکتروموتورهای القایی AC سه فاز از این نوعند. که روتور آنها از نوع قفس سنجابی است که قبلا توضیح داده شد. محدودههای طبقه بندی نیروی آنها از یک سوم تا چند صد اسب بخار است. الکتروموتورهای سه فاز از این نوع که در محدوده یک اسب بخار به بالا قرار دارند در مقایسه با الکتروموتورهای مشابه تک فاز کم هزینه ترند و میتوانند در زمان استارت با بارهای سنگینتر کار کنند.

الکتروموتور القایی سه فاز قفس سنجابی با روتور سیم پیچی شده (اسلیپ رینگ)

الکتروموتور
با حلقه لغزان یا الکتروموتور
با
روتور سیم
پیچی شده، نوعی از
الکتروموتورهای القایی قفس سنجابی است. درحالی که
استاتور در این الکتروموتور همانند الکتروموتور قفس سنجابی است یک سری از
پیچهها را روی روتور خود دارد که در حالت مدارکوتاه نیستند ولی
به
یک سری از رینگهای لغزان ختم میشوند. این پیچهها در
اضافه
کردن مقاومتها و خازنهای خارجی سودمندند. لغزش لازم برای تولید گشتاور
حداکثر نهایی مستقیماً با مقاومت روتور متناسب است. در الکتروموتور با
حلقه لغزان مقاومت موثر روتور با اضافه کردن مقاومت خارجی میان
حلقههای لغزان کاهش میابد. بنابراین امکان بدست آوردن لغزش
بیشتر و
همچنین گشتاور حداکثر نهایی در سرعتهای کمتر وجود دارد. یک مقاومت خارجی
میتوانددر سرعت تقریباً صفر را نتیجه دهد که گشتاو
حداکثر
نهایی بسیار زیادی با جریان استارت کم را تولید میکند. هنگامی
که
محور الکتروموتور
شتاب میگیرد مقدار مقاومت میتواند
کاهش یابد
تا مشخصات الکتروموتور برای کارهایی با فشار کاری زیاد مناسب شود. هنگامی
که الکتروموتور به سرعت دوران نامی میرسد خازنهای خارجی از مدار
خارج میشوند و این یدین معنی است که اکنون الکتروموتور به عنوان
یک
الکتروموتور القایی
استاندارد کار میکند.
این نوع الکتروموتور
برای فشارهای استاتیکی ثابت که درآنها گشتاور نهایی
باید در سرعت تقریباً صفر تولید شده و الکتروموتور درکمترین
زمان و با
کمترین مصرف جریان تا سرعت نامی شتاب گیرد ایدهآل است. قسمت
انتهایی
الکتروموتور با حلقه لغزان که در آن حلقهها به همراه مجموعه
جاروبکها است به نگهداری منظم نیاز داردکه از نظر قیمت، استاندارد بودن آن
را به عنوان یک الکتروموتور
القایی قفس سنجابی غیر ممکن میکند.
اگر
پیچهها کوتاهتر شده و استارت زده شود معمولاً جریان بالا از
روتور
در حالت توقف عبورمی کند که در حد ۱۴۰۰ درصد است. درحالیکه در این حالت
درآن گشتاوری در حد ۶۰ درصد تولید مینماید که در بسیاری از
کاربریها
امکان پشتیبانی چنین موردی نیست. با تغییر مقاومتهای روتور منحنی سرعت
گشتاور تعدیل میگردد که بدین وسیله سرعتی که درآن الکتروموتور
در
بار مشخصی کارمی کند تعدیل میشود. مقدار اضافه بار
میتواند
سرعت را تا ۵۰درصد سرعت سنکرون کاهش دهد. خصوصاً هنگامی که بار، از انواعی
با نیاز به گشتاور – سرعتهای مختلف مثل پرسهای چاپ یا کمپرسورها
است. کاهش سرعت تا زیر ۵۰درصد بازده را به خاطر اتلاف انرژی در مقاومتها
به شدت کاهش میدهد. این نوع الکتروموتور در
کاربریهایی با چرخش
با
گشتاور و سرعتهای مختلف مانند پرسهای چاپ، کمپرسورها، تسمه
نقالهها،
بالابرها و آسانسورها مورد استفاده قرار
میگیرد.
الکتروموتور پله ای یا سرو
نوع دیگری از الکتروموتورها، الکتروموتور
پلهای یا
سرو موتور است، که در آن یک روتور درونی، شامل آهنرباهای دائمی توسط یک
دسته از آهنرباهایی با کنترل الکترونیکی روشن-خاموش شدن خارجی، کنترل
میشود. یک الکتروموتور
پلهای ترکیبی از یک
الکتروموتور DC
و
یک سلونوئید است.
الکتروموتورهای پلهای ساده توسط بخشی از یک سیستم
دندهای در
حالتهای موقعیتی معینی قرار میگیرند، اما الکتروموتورهای
پلهای کنترل شده، میتوانند بسیار آرام بچرخند.
الکتروموتورهای
پلهای کنترل شده با رایانه یکی از فرمهای
سیستمهای
تنظیم موقعیت است، بویژه وقتی که بخشی از یک سیستم دیجیتال دارای کنترل
فرمان بار باشند.
الکتروموتور خطی
یک الکتروموتور خطی اساساً یک الکتروموتور است که از حالت دوار درآمده تا بجای اینکه یک گشتاور گردشی تولید کند، یک نیروی خطی توسط ایجاد یک میدان الکترومغناطیسی سیار در طولش، بوجود آورد. الکتروموتورهای خطی اغلب الکتروموتورهای القایی یا پلهای هستند.
لیست قیمت الکتروموتور موتوژن - سه فاز پوسته آلومینیومی
لیست قیمت الکتروموتور موتوژن - سه فاز پوسته چدنی
لیست قیمت الکتروموتور تک فاز موتوژن - تک خازن دائم کار رله ای
لیست قیمت الکتروموتور تک فاز موتوژن - دو خازن کلاچ دار
لیست قیمت الکتروموتور جمکو
لیست قیمت الکتروموتور دیزل ساز
لیست قیمت الکتروموتور استریم
لیست قیمت الکتروموتور تک فاز استریم
لیست قیمت الکتروموتور عمودی استریم
لیست قیمت الکتروموتور تک فاز الکو
توجه: کلیه حقوق این مقاله متعلق به صنعت گستر ایران زمین میباشد. هرگونه کپی برداری از مطالب این وب سایت ممنوع بوده و پیگرد قانونی دارد

با ما همراه باشید







- نشانی: تهران - خیابان سعدی جنوبی - کوچه خوانساری - پلاک 48 - ساختمان پاسارگاد - واحد 5
- تلفن: 36915796 (021)
- 8 - 33993356 (021)
کليه حقوق اين وب سايت متعلق به صنعت گستر ايران زمين مي باشد و هرگونه کپی برداری ممنوع بوده و پیگرد قانونی دارد